

Autor: Ing. Javier Silva Ortiz / rosa.ortiz@mtz.jovenclub.cu
Coautor: MSc. Rosa E Ortiz Socorro
Resumen
La navegación por satélite es una tecnología con disímiles aplicaciones, está presente en muchas áreas de la vida humana, y son muchos los dispositivos que cuentan con esta tecnología. Sin embargo, su funcionamiento, a pesar de no ser muy complicado, no es conocido por la mayoría de las personas. En el presente artículo se expone una reseña histórica sobre los sistemas de navegación por satélite, y también una introducción didáctica, al funcionamiento detrás de esta misteriosa y asombrosa tecnología.
Palabras claves: GPS, GLONASS, navegación, satélite, posicionamiento, coordenadas
Abstract
Satellite navigation is a technology with dissimilar applications, it is present in many areas of human life, and there are many devices that have this technology. However, its operation, although not very complicated, is not known by most people. This article presents a historical review of satellite navigation systems, as well as a didactic introduction, to the operation behind this mysterious and amazing technology.
Key words: GPS, GLONASS, navigation, satellite, positioning, coordinates
Introducción
La ubicación y el posicionamiento geográfico son actividades y necesidades humanas desde tiempos ancestrales. La expansión durante milenios que conllevó a la humanidad a su estado actual, no hubiera sido posible sin métodos de determinación de la posición y la hora, ayudas indispensables para la navegación y la exploración.
Primitivas en sus comienzos, las técnicas de posicionamiento y hora se limitaban a observar la posición de los astros en el cielo, o la sombra proyectada por una estructura debido a la luz solar, e incluso a observar la posición relativa a una marca terrestre como una montaña. Con el paso del tiempo fueron evolucionando y se incorporaron herramientas como el sextante, el astrolabio, el sextante de Bris, la recta de altura, la brújula, entre otros.
Hoy día, con la conquista del espacio exterior, y los profundos avances tecnológicos de los siglos XX y XXI, la navegación ha adquirido una nueva dimensión con el uso de satélites para calcular las coordenadas geográficas y la hora. Numerosos satélites ubicados en el espacio alrededor de nuestro planeta brindan ayuda a la navegación todo el tiempo y en todas partes, el único requisito es tener un dispositivo capaz de recibir y entender la información que transmiten.
Las posibilidades que brinda la navegación satelital están limitadas solo por la imaginación, dentro de sus aplicaciones se pueden encontrar:
- Agricultura de precisión.
- Búsqueda y salvamento.
- Rastreo de vehículos y mercancía.
- Aterrizaje de aeronaves en baja visibilidad.
- Navegación asistida en automóvil.
- Geografía, Mineralogía y Cartografía.
- Localización de epicentros en terremotos.
Las aplicaciones de la navegación por satélite son sumamente vastas. Existen incluso propuestas para incorporar posicionamiento en artículos personales como llaves y ropa, para así saber dónde están incluso si nos olvidamos. Con la ayuda de los satélites y un simple conocimiento geométrico somos capaces de determinar nuestra posición con buena precisión y exactitud.
El presente artículo tiene como objetivo realizar una reseña histórica sobre los sistemas de navegación por satélite, y también una introducción didáctica, al funcionamiento detrás de esta asombrosa tecnología.
Desarrollo
Los sistemas de navegación son una tecnología con vastas aplicaciones en todas las esferas de la sociedad moderna. Están presentes en casi todas las áreas y labores de nuestra sociedad e incluso, varias actividades, como la aviación; son inconcebibles sin ellos, ya que estos son cruciales para el desarrollo de las mismas.
Con una interesante y extensa historia, datan desde la más remota antigüedad, cuando el ser humano apenas comenzaba a lanzarse a la mar o a realizar largas expediciones de a pie, hasta nuestros días cuando ya se ha conquistado el espacio; y siguen en continuo desarrollo.
En la actualidad, los sistemas de navegación por radio son los más avanzados de todos, y dentro de estos, los satelitales ocupan el pináculo del desarrollo en esta área, se conocen como GNSS (sigla del ingl. Global Navigation Satellite System). Entre ellos se encuentran el GPS (Sistema americano de navegación y localización mediante satélites), GLONASS (Global’naya Navigatsion naya Sputnikovaya Sistema), GNSS (Sistema Global de Navegación por Satélite) desarrollado por la Unión Soviética, Galileo y COMPASS (proyecto de sistema de navegación por satélite que lleva a cabo la República Popular China); pero solamente GLONASS y GPS están completamente terminados y operativos con cobertura global.
Es sensato afirmar que la mayoría de las personas están al tanto de la existencia del “GPS”, ya sea por poseer algún dispositivo con soporte para navegación por satélite como lo es un teléfono inteligente o una tableta; o por ejecutar alguna labor de oficio donde la navegación por satélite esté presente, como chófer o piloto.
El término «GPS» se ha convertido en sinónimo de navegación por satélite, esto no ocurrió por mera casualidad, se debe a que fue el primero en desarrollarse completamente y en ponerse al servicio de la humanidad, y a sus excelentes prestaciones. Sin embargo lo que poco se sabe es que el GPS es uno de los tantos sistemas de navegación por satélite existentes en la actualidad. El propósito de los sistemas GNSS es el de proveer las coordenadas más exactas posibles a un dispositivo, además es una fuente altamente estable y precisa de hora y tiempo.
Los sistemas de navegación por satélite tienen sus orígenes a mediados del comienzo de la era espacial, cuando en 1957, la Unión Soviética (Rusia hoy) lanzó el satélite Sputnik I, que era monitorizado mediante la observación del efecto Doppler de la señal que transmitía. Debido a este hecho se comenzó a pensar que, de igual modo, la posición de un observador podría ser establecida mediante el estudio de la frecuencia Doppler de una señal transmitida por un satélite cuya órbita estuviera determinada con precisión (Misra & Enge, 2016).
La armada estadounidense rápidamente aplicó esta tecnología, para proveer a sus flotas de observaciones de posiciones actualizadas y precisas. Así surgió el sistema TRANSIT, que quedó operativo en 1964, y hacia 1967 estuvo disponible, además, para uso comercial. Las actualizaciones de posición, en ese entonces, se encontraban disponibles cada 40 minutos y el observador debía permanecer casi estático para poder obtener información adecuada.
Posteriormente, en esa misma década y gracias al desarrollo de los relojes atómicos, se diseñó una constelación de satélites, portando cada uno de ellos uno de estos relojes y estando todos sincronizados con base a una referencia de tiempo determinada.
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aérea de los Estados Unidos (este último consistente en una técnica de transmisión codificada que proveía datos precisos usando una señal modulada con un código de PRN (Pseudo-RandomNoise: ruido pseudo-aleatorio), en lo que se conoció como NavigationTechnology Program (Programa de Tecnología de Navegación), posteriormente renombrado como NAVSTAR GPS (Misra & Enge, 2016).
Entre 1978 y 1985 se desarrollaron y lanzaron once satélites prototipos experimentales NAVSTAR, a los que siguieron otras generaciones de satélites, hasta completar la constelación actual, en abril de 1995. En 2009, este país ofreció el servicio normalizado de determinación de la posición al mundo y fue acogido en gran medida con entusiasmo y buena voluntad.
Paralelamente, el primer sistema de navegación por radio desarrollado en la Unión Soviética fue Tsiklon, el cual tenía el propósito de proveer un método de posicionamiento a los submarinos de misiles balísticos. Entre los años 1967 y1978 se lanzaron 31 satélites Tsiklon.
El principal problema de este sistema era que a pesar de brindar una alta precisión requería varias horas de observación por un receptor para fijar una posición. Entre los años 1968 y 1969, se concibió un nuevo sistema de navegación por satélite que daría soporte a todas las fuerzas terrestres, marítimas y aéreas; el cual fue nombrado GLONASS (Global’naya Navigatsion naya Sputnikovaya Sistema).
La Unión Soviética (Rusia hoy) comenzó el desarrollo del proyecto GLONASS en 1976. Comenzando el 12 de octubre de 1982. Debido a la crisis económica y el desmantelamiento del campo socialista enfrentado por el país entre los años 1989 y 1999, fue incapaz de llevar al sistema a su máximo estado operativo. En el 2001, bajo la presidencia de Vladimir Putin la economía rusa experimentó una estabilización y la restauración del sistema fue hecha una prioridad máxima del gobierno. En el 2010 se completó la constelación de 24 satélites completamente operativos con cobertura global.
Existen otros proyectos de navegación por satélite, la Unión Europea tiene en desarrollo el sistema Galileo, y China el sistema Beidou (actual COMPASS), ambos en desarrollo y despliegue parcial. Solamente el GPS de Estados Unidos y el GLONASS ruso están completamente operativos, con cobertura global y en constante mejoramiento. Es por eso que hasta la fecha solo estos dos sistemas son los utilizados para las tareas de posicionamiento del mercado en general. (Ver figura 1)

Los GNSS constan de tres segmentos: Segmento de Control, Segmento Espacial y Segmento de Usuario. El Segmento de Control, conocido también como Segmento Terrestre o Sistema de Control Operacional, consiste en una red de estaciones terrestres cuyas funciones son (OACI, 2006):
- Seguimiento de los satélites GNSS y monitoreo de sus transmisiones.
- Realizar análisis y subir nuevos datos a sus respectivas constelaciones para mantener la correcta operación del sistema.
| Descripción | |
| GPS | 2 – Centros de Control Maestro (Principal y Alternativo)
16 – Estaciones de monitoreo 8 – Estaciones de seguimiento remoto 4 – Antenas de comunicación terrestres |
| GLONASS | 2 – Centros de Control de Sistema (1 completamente operacional)
10 – Estaciones de monitoreo (4 completamente operacionales y una en nuestro país) 3 – Estaciones medidoras de distancias por láser 3 – Estaciones de subida de datos 1 – Reloj central |
Tabla 1: Segmento de Control de GPS y GLONASS
El segmento espacial está compuesto por una constelación de satélites orbitando la Tierra en una configuración geométrica determinada, estas constelaciones están diseñadas para asegurar la visibilidad de al menos cuatro satélites todo el tiempo. La función principal del segmento espacial es la de transmitir las señales de radionavegación requeridas por los usuarios de GNSS para estimar su posición, velocidad y/o tiempo, estas señales de radionavegación están controladas por relojes atómicos altamente estables y contienen códigos de distancia, mensajes de navegación y correcciones subidas por el segmento de control.
La siguiente figura es una instantánea de las constelaciones de GPS y GLONASS tomadas el 29 de noviembre del 2012 exactamente a las 12:00 M horas nocturnas UTC (OACI, 2006).
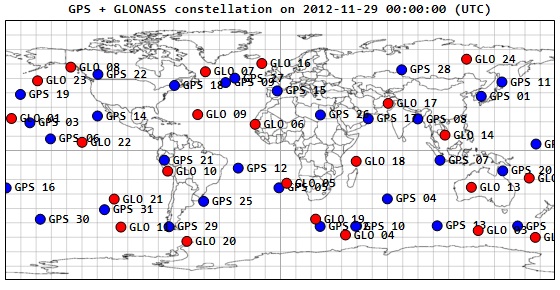
Para el sistema GPS, el segmento espacial consiste en una constelación de 24 satélites (aunque existen 32 disponibles), distribuidos sobre seis planos orbitales a una altitud de 20180 km y una inclinación nominal de 55 grados con respecto al ecuador; un periodo orbital de 11 horas y 58 minutos, la misma geometría satelital se repite cada día sidéreo, con todos los satélites en los mismos lugares en el cielo (Agency, E.S., s.f.).
Cada satélite transmite dos códigos, el código público C/A en la frecuencia L1 (satélites modernizados también transmiten este código en la frecuencia L2), y un código encriptado P (solo disponible para usuarios autorizados) en ambas frecuencias. Como todos los satélites usan las mismas frecuencias L1 y L2, cada satélite cuenta con su propio y único número pseudo-aleatorio (PRN) el cual no se correlaciona con ninguno de los otros, formando de esta manera un esquema de acceso múltiple por división en código (CDMA), permitiendo a los receptores reconocer varios satélites en una misma frecuencia.
Para el sistema GLONASS, el segmento espacial consiste en una constelación de 24 satélites, distribuidos sobre tres planos orbitales a una altitud de 19140 km y una inclinación nominal de 64.8 grados con respecto al Ecuador; un periodo orbital de 11 horas y 15 minutos, la misma geometría satelital se repite cada 8 días, pero como cada plano orbital contiene 8 satélites igualmente espaciados, estarán en el mismo lugar en el cielo cada día sidéreo.
Al igual que los satélites del GPS, los satélites del GLONASS también transmiten un código público C/A y uno encriptado P (también solo está disponible para usuarios autorizados) en ambas frecuencias L1 y L2, pero a diferencia de los satélites del GPS, cada satélite del GLONASS transmite el mismo código PRN pero a diferentes frecuencias de portadoras (14 en total), formando de esta manera un esquema de acceso múltiple por división en frecuencia (FDMA), permitiendo a los receptores reconocer múltiples satélites con el mismo código.(Agency, E.S., s.f.)
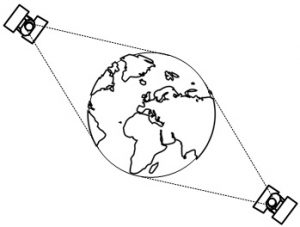
Los 24 satélites del GLONASS pueden operar con solo 14 frecuencias debido al uso de lo que se denomina «Satélites Antipodales». Estos son satélites que están en el mismo plano orbital, pero separados 180 grados en latitud, asegurando de esta forma que dos satélites que comparten la misma frecuencia, nunca estén visibles al mismo tiempo en ninguna parte del planeta. Véase la siguiente imagen. Véase la siguiente imagen.
| GPS | GLONASS | ||
| Satélites
|
Satélites disponibles | 32 | 24 |
| Planos orbitales | 6 | 3 | |
| Inclinación orbital | 55º | 64.8º | |
| Altitud orbital | 20180 km | 19140 km | |
| Periodo de revolución | 11 h 58 m | 11 h 15 m | |
| Señales | Técnica de acceso | CDMA | FDMA |
| Frecuencia Fundamental | 10.24 MHz | 5.0 MHz | |
| Frecuencia de portadora L1
L2 |
1575.42 MHz 1227.60 MHz |
1598.0625 – 1609.3125 MHz 1242.9375 – 1251.6875 MHz |
|
| Velocidad de reloj de código C/A
P |
1.023
10.23 |
0.511
5.11 |
|
| Longitud de código C/A
P |
1023
6.1871041012 |
511
5.11106 |
|
Tabla 2: Propiedades fundamentales de GPS y GLONASS.
Las propiedades de las constelaciones satelitales de los sistemas GPS y GLONASS, y las propiedades de sus señales están resumidas en la tabla anterior, donde las frecuencias y las velocidades están en MHz.
El segmento de usuario engloba a todos usuarios civiles, académicos, militares y comerciales con receptores de banda L, procesadores y antenas capaces de recibir, decodificar y procesar las señales GNSS para estimar su posición, velocidad y/o tiempo. Las siguientes imágenes son representativas de este segmento.

El problema de determinar la posición, velocidad y/u hora en el usuario se denomina en la literatura como el problema de la navegación por satélite. Su base consiste en resolver un problema geométrico conocido como trilateración. Esta es un proceso geométrico usado para determinar la localización de un punto, basado en su distancia a un conjunto de otros puntos de los cuales su posición es conocida, usando las propiedades de figuras geométricas como círculos, esferas o triángulos.
En el problema de navegación por satélite, el punto cuya posición se desconoce se corresponde con la posición del receptor, y, el conjunto de puntos cuyas posiciones son conocidas se corresponden con las posiciones de los satélites visibles (Misra & Enge, 2016).
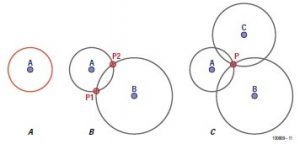
Si se toma la distancia de un punto conocido (A) al desconocido (P) como un radio, entonces se puede trazar una circunferencia (A) tal que, el punto P esté sobre ella. Como solo se conoce la distancia hacia P y no su dirección, se infiere que P puede estar en cualquier parte sobre la circunferencia A, véase la siguiente figura. Si a continuación se traza otra circunferencia (B) siguiendo el mismo método, se interceptan en dos puntos, o sea, se reducen las infinitas posibilidades donde está el punto desconocido a solo dos, P1 y P2.
Para resolver esta última ambigüedad, se añade una tercera circunferencia (C), siguiendo las mismas reglas. Se han reducido los posibles lugares del punto desconocido P a solo uno. Sin pérdida de generalidad, en el espacio, o sea en tres dimensiones, en lugar de tres circunferencias serían cuatro esferas.
Los tres puntos antes mencionados son tres de cualquiera de los satélites de una constelación GNSS, estos tres satélites por supuesto varían en dependencia del lugar geográfico donde usted se encuentre y puede que incluso logre tener cobertura de más de tres satélites, pero solo se necesita de tres para determinar su posición. Note que el número tres es debido a que se está explicando en el método en un plano, la vida real no es plana, o sea, no ocurre en dos dimensiones espaciales, sino que ocurre en tres dimensiones espaciales y entonces se necesitarían cuatro satélites para eliminar la ambigüedad en el cálculo de la altura.
Se ha dicho que se necesita conocer la distancia entre usted y cada uno de los satélites, y además saber la posición en la que se encuentran, para con esta información poder determinar en qué lugar usted se encuentra. Parece ser que conocer la distancia entre usted y los satélites y además saber la posición de cada uno de ellos es aún más difícil que calcular su propia posición, pero no es el caso.
Obviamente, cada satélite conoce sus coordenadas con respecto al centro promedio de la Tierra, cada satélite además cuenta con uno o varios relojes atómicos, que son relojes muy estables que se atrasan o se adelantan menos de una millonésima de segundo cada un periodo de 10 años o más, usted en su dispositivo también cuenta con un reloj de alto rendimiento, pero no tan alto como un reloj atómico, debido a razones de costo.
Cada satélite está constantemente transmitiendo hacia la Tierra una señal que entre otros datos contiene, el número del satélite, su posición y un código aleatorio que se utiliza por el receptor para sincronizar los relojes. Está señal, por principios y leyes físicas, viaja a la velocidad de la luz, la cual es una constante conocida con un valor de 299792458 m/s. Por supuesto, la señal sufre ligeras variaciones al pasar por las diversas capas de la atmósfera terrestre.
Con todos estos datos, número del satélite, hora de envío de la señal, velocidad de la luz, el dispositivo receptor es capaz de calcular todo lo que necesita. Primeramente, el usuario sincroniza su reloj con el del satélite, y así es capaz de medir la diferencia de tiempo entre su reloj y el del satélite y usando la velocidad de la luz logra calcular a qué distancia se encuentra el satélite de él, o sea, el tiempo que se demoró en llegar la señal, multiplicado por la velocidad a la que se mueve, nos da la distancia que tuvo que recorrer. Ayudado de datos extras, el receptor calcula entonces las coordenadas de los satélites.
Este procedimiento se realiza para cada uno de los satélites, y luego se plantea el método de trilateración que consiste en resolver un conjunto de ecuaciones donde las incógnitas son las coordenadas del usuario.
Puede parecer compleja y trabajosa la forma de determinación de la posición, pero de hecho es un proceso sumamente rápido y de muy bajo costo de implementación. Esta es una de las razones por las cuales la navegación por satélite cada de día se abre paso a más aplicaciones en la sociedad moderna.
Conclusiones
Hoy día, numerosos satélites orbitan el planeta, los cuales constantemente transmiten señales que ayudan a determinar una posición en cualquier lugar del planeta con elevada exactitud y precisión. Los pioneros en el desarrollo de la navegación por satélite fueron los Estados Unidos, seguidos casi paralelamente por la Unión Soviética (Rusia). A pesar de llevar varias décadas en existencia, su uso por parte de la sociedad civil no data más de una década, pero ha encontrado numerosísimas aplicaciones, tanto más que las aplicaciones militares para las cuales fue originalmente diseñada.
Referencias Bibliográficas:
Agency, E.S., (2013), GNSS Data Processing. Segunda ed. Vol. Volume I: Fundamentals and Algorithm: ESA Communications. 238.
El-Arini, M.B. (2008). Tropospheric Effects on GNSS. The MITRE Corporation.
Ferrao, P.F.F.N. (2013). Positioning with Combined GPS and GLONASS Observations. Instituto Técnico de Lisboa.
Grinter, T. (2013). Real Time Precise Point Positioning: Are We There Yet? International Global Navigation Satellite Systems Society.
Misra, P.& Enge, P. (2006). Global Positioning System: Signals, Measurements, and Performance (2da. ed.): Ganga-Jamuna Press.
Mola, R. (2012). History of Aircraft Landing Aids. Recuperado de www.centennialofflight.net.
OACI. (2006). Anexo 10 al Convenio sobre Aviación Civil Internacional. Telecomunicaciones Aeronáuticas. Vol. Volumen I: Radioayudas para la navegación.
OACI. (2013). Guía para la implementación de sistemas de aumentación basados en tierra, OACI: Editora OACI.
Spits, J. (2012). Total Electron Content reconstruction using triple frequency GNSS signals, in Department of Geography. Universidad de Liege.
Weill, L.R. (1997). Conquering Multipath: The GPS Accuracy Battle.GPS World.